자율주행 실험도시(K-City)
테스트 지원
K-City 평가항목
주요업무
35종 시설 구비 : 톨게이트, 신호체계(신호/비신호/점멸), 버스전용차로(중앙/가변), 스쿨죤, 톨게이트, 터널(통신음영), 회전교차로, 자전거도로/보도, 철도건널목 등
| 비고 | 기반시설 | 설치내용 | 평가항목 |
|---|---|---|---|
| 도심부 | 버스전용차로 | - 2→4(3+1)차로 확장(260m) - 버스전용차로 관련 차선마킹 및 부대시설(표지판, 차선변경금지봉 등) 설치 |
- 버스전용차로(중앙/가변) 인지 및 버스로 인한 영향 평가 |
| 건물면설치 | - 건물면(고정식/이동식 철공공사 및 폴리프로필렌건물면) 설치 및 컨테이너 신설 - 156m(고정식), 70m(이동식) - 12개(컨테이너) |
- 건물면(이동식, 다양한 높이)으로 인한 환경 인지 영향 평가 | |
| 신호교차로 | - 4지, 3치 교차로 -2010년형 교통신호제어기 8대 -CVIB(신호정보 연계장치) 8대 |
- 교차로 및 횡단보도 인지 여부 - 차량 및 보행자 신호현시 인지 여부 - 차량/보행자 상충발생 평가 - 돌발상황에 대한 대처 여부 평가 등 |
|
| 버스/택시 정류장 | - 버스 및 택시정류장 1개소 | - 버스/택시 출발 시 상충발생 상황 대처 평가 | |
| 교외도로 | 회전교차로 | - 평면교차로→2차로 회전교차로 설치 | - 회전교차로 인지 및 차량간 우선순위 결정 - 상충상황 대처 평가 |
| 비신호교차로 | - 2차로 신설(L=60.0m) - 시종점부 평면교차로 설치 |
- 비신호교차로 인지 및 영향 평가, 주행장 이동동선 확보 | |
| 가로수길 | - 양방향 가로수길(인조목) 조성(L=160m) | - 가로수로 인한 환경 인지 성능 영향 평가 | |
| 터널구간 | - 천막형 터널(L=120m, 타포린 재질) | - 터널 통과구간에서 명암(명각화/암각화)에 의한 환경인지성능 평가 | |
| 공사도로/도로 노면 노이즈 | - 포트홀, 맨홀, 도로파손, 도로변형 등의 노면 노이즈 도로 | - 공사도로 및 다양한 노면 상태에 따른 도로환경 인지 성능 평가 | |
| 협로(골목길) | - 노변 장애물이 존재하는 도로환경 구현 | - 양방향 비분리구간(협로)인지 및 상충발생 상황대처 평가 | |
| 커뮤니티부 | 학교부지 및 스쿨죤 | - 보도신설(L=70.0m) - 스쿨존 관련 부대시설 설치(차선마킹, 포장형식 등) |
- 어린이보호구역에서 교통약자와의 상충발생 상황 대처 평가 |
| 보도 및 자전거도로 | - 보도 및 자전거도로 설치(L=40.0m) | - 보도/자전거도로 인지 및 보행자/자전거와의 ·상충발생 상황 대처 평가 - 자동차안전도평가(ISA) 수행 가능 |
|
| 자율주차시설 | 자율주차시설 | - 기존 주차시설 규모 확장 - 주차시설 관련 부대시설 설치 - 2층 형태 주차시설 추가 |
- 직각/평행/사선 주차 기능 평가 - 상충발생 상항 대처 평가 - 자율 발렛 주차 기능 평가 |
| 노견주차시설 | - 도로양측으로 주차시설을 위한 공간 확장(L=70m) - 주차관련 차선마킹 및 부대시설 설치 |
- 노면주차구간에서의 직각/평행/사선주차 기능 평가 - 자동차안전도평가(RCTA) 수행 가능 |
|
| 자동차 전용도로 |
톨케이트 | - 톨게이트 2차로 - 하이패스 1차로, 톨게이트 1차로 |
- 톨게이트 인지 및 통과 기능 여부 평가(Hi-pass 및 일반 톨게이트 구성) |
| 도로시설물 | - 본선 내 중앙분리대 설치(L=320m) - 높이 127cm형(L=160m) - 높이 81cm형(L=160m) - 본선 좌우측 가드레일 설치(L=284m) - 중분대용(L=184m) - 노견용(L=100m) - 소음방음벽 설치(L=100m) |
- (본선)고속주행환경에서 차간거리/차선유지/전방충돌경고, 비상자동제동 기능 등 평가 - (갓길)운전자 긴급상황 발생 시 대처 여부 평가 - 도로시설물구간(방음벽, 가드레일, 중분대) 통신 및 환경인지 영향 평가 - 가속차로 이용 및 본선 합류/분류 기능 평가 - 자동차안전도평가(LDWS, LKAS(직선), AEBS, FCW) 수행 |
|
| 합류부 도로 및 가속차로 |
- 합류부 연결방법 변경(차선도색) | - 자동차전용도로 가속차로 이용 및 본선 합류 기능 평가 |
주요업무
| 유형 | 개념도 | 궤적 | 시나리오 설명 |
|---|---|---|---|
| 고속주행도로 |  |
직진 | 시험차량은 전방차량의 감속(gentle deceleration)에 대응하여 감속하고 전방차량과의 안전거리를 유지 |
 |
차로변경 | 시험차량은 감속 및 차로를 변경하여 전방차량의 감속(gentle deceleration)에 대응하고 전방차량을 추월 | |
| 교외부 도로 |  |
직진 | 시험차량은 전방차량의 급감속에 대응하여 감속하고 전방차량과의 안전거리를 유지 |
 |
차로변경 | 시험차량은 감속하는 전방차량에 대응하여 감속 및 차로변경 | |
| 도시부 도로 |  |
교차로: 직진 | 시험차량은 전방차량의 급감속에 대응하여 감속하고 전방차량과의 안전거리를 유지 |
 |
교차로: 차로변경 | 시험차량은 교차로 접근로에서 급감속하는 전방차량에 대응하여 감속 및 차로변경 | |
| 커뮤니티부 도로 | 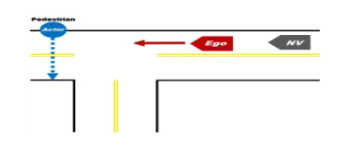 |
교차로: 직진 | 시험차량이 스쿨존의 3지교차로를 통과하기 위해 직진 중, 보행자(Actor)가 무단횡단하여 급 감속하는 상황 |
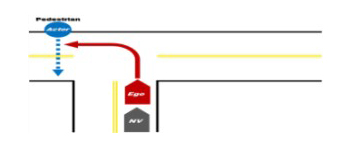 |
교차로: 좌회전 | 시험차량이 스쿨존의 3지 교차로에서 좌회전 중, 보행자(Actor)가 무단횡단하여 급 감속하는 상황 |
K-City 테스트평가 제공/지원시스템
| 1 | 신호정보 제공 시스템 | 11 | 스쿨존 시스템 |
| 2 | 교차로 지원 시스템 | 12 | 전방위험구간 경보시스템 |
| 3 | 제한속도 변경 안내시스템 | 13 | 첨단 본선 합류 지원 시스템 |
| 4 | 보행자 충돌방지 알림 시스템 | 14 | 협로 주행지원시스템 |
| 5 | 횡단보도 신호정보 제공 시스템 | 15 | 첨단 주차 지원 시스템 |
| 6 | LKAS : 차로유지지원시스템 | 16 | TJA : 혼잡구간주행지원시스템 |
| 7 | LDWS : 차로이탈경고시스템 | 17 | 후측방 충돌회피 지원시스템 |
| 8 | ACC : 적응순항제어시스템 | 18 | 부주의 운전 경보 시스템 |
| 9 | FCW : 전방충돌경고시스템 | 19 | 응급상황 비상정지 시스템 |
| 10 | AEBS : 비상자동제동시스템 |
주요업무
35종 시설 구비 : 톨게이트, 신호체계(신호/비신호/점멸), 버스전용차로(중앙/가변), 스쿨죤, 톨게이트, 터널(통신음영), 회전교차로, 자전거도로/보도, 철도건널목 등
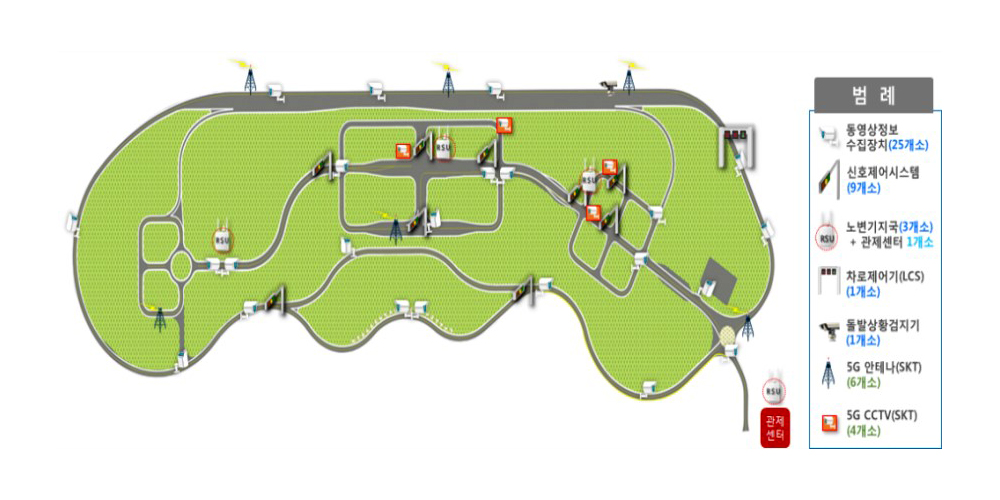
K-City 통합관제시스템 구축현황
- (목표) 시험자가 생성하는 시나리오 기반으로 관련 인프라를 연동 및 제어하고, 자율차의 정보를 센터에서 수집 및 분석/평가
- 시험자가 생성한 시나리오 기반의 인프라 운영 및 시험차량의 거동정보에 기반한 센터 중심의 능동적 테스트환경 제공
- 시나리오 생성/통제시스템, 분석/평가시스템, 수집시스템, 보안시스템 등

- (차세대 ITS(C-ITS) 구축) 국내 표준 V2X 통신시스템 반영으로 차량-도로간 Connected 환경 구축
- 첨단신호제어기, 레이더유고검지기, CCTV 등 C-ITS 현장시스템 구축
* 차세대 ITS(C-ITS, Co-operative Intelligent Transport Systems) - (WAVE 기반 V2X 통신) 위치기반 차량데이터 수집 및 교통정보 제공, 지역별 특화정보 제공 등
* (5G 통신환경) 초고속/대용량/초저지연 데이터 수집환경 구현
- 첨단신호제어기, 레이더유고검지기, CCTV 등 C-ITS 현장시스템 구축
- (통합관제센터 구축) 시험자가 생성한 시나리오 기반의 인프라 운영 및 시험차량의 거동정보에 기반한 센터 중심의 능동적 테스트환경 제공
- 시나리오 생성/통제시스템, 분석/평가시스템, 수집시스템, 보안시스템 등
- C-ITS 현장시스템의 원격관제가 가능한 센터시스템 구축
- 자료 축적 및 분석환경을 위한 통합 데이터베이스 구축
 [ 전구간 실시간 모니터링 ]
[ 전구간 실시간 모니터링 ]
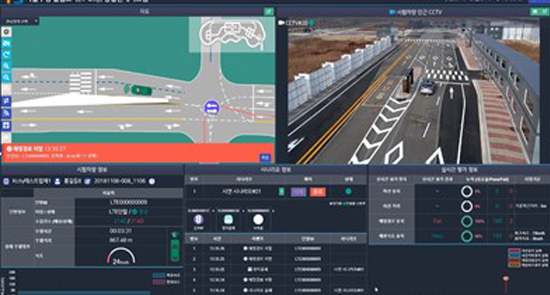 [ 시나리오 관제 ]
[ 시나리오 관제 ]
주요업무
K-City 테스트베드 내 관제시설 2곳, 장비보관실(컨테이너) 63동, 공용정비고 1곳 시설 제공
| 통합관제센터1층 | 데이터 처리 | - 실험시나리오 설정 및 모니터링 - 데이터 처리 및 분석평가 SW 제공 - 실험 평가 기술개발 분석 |
 |
| 도심부 상황실 컨테이너 2층 |
데이터 분석 | - 실험시나리오 등록 및 관제 시설 - 현장 상황 및 테스트 공간 - 데이터 처리 및 분석평가프로그램 |
 |
| 도심부 상황실 컨테이너 1층 |
다용도실 | - 사용자 평가장비 보관 - 교통안전시설물 보관 공간 |
 |
| 커뮤니티부 컨테이너 1, 2층 |
임시 사무실/ 다용도실 | - 2층 임시 사무실 - 1층 : 장비, 시설물 등의 장비보관 |
 |
| 통합관제센터1층 | 공용 정비고 | - 주행시험장 관제센터 內 정비시설 공동사용 - 자율주행차 배선 및 차량정비공간 |
 |
| 도심부 상황실 맞은편 컨테이너(3동) |
다용도실 | - 시험장비, 차량부속, 센터, 테스트시설 등 보관 |  |
| K-City 내 컨테이너 1층 (68 개동) |
장비보관/ 다용도실 | - 차량부속, 테스트 시설 등 보관 장소 등 다용도 공간 - K-City내 컨테이너 1층 68개동 사용 허가 완료 |
 |
개요
K-City 내 다양한 시나리오 재현·반복시험이 가능한 로봇시스템 구축을 통해 자율주행 기술개발 및 안전성 평가 수행
주요업무
- 장비 구축현황 : 혼잡상황재현, 자율차 돌발상황 대처 등을 위한 평가장비 구축
※ 성인·어린이 보행자, 자전거 더미 및 런치패드*, 차량(EVT, GST) 평가장비**, 평가시스템 운영차량*** 구축
* 보행자 충돌모의타겟 : 보행자 모양 3D 더미탑재하여 충돌시나리오, 비상제동장치 평가 등 활용
** 자동차 충돌모의타겟 : 자동차 모형 3D 더미탑재하여 충돌시나리오, 비상제동장치 평가 등 활용
*** K-City 통합관제차량 : 충돌모의타겟 시험테스트 환경제공 및 관제업무 수행
무상지원 및 시범운영
~ 2024. 12. 31.
담당자
K-City연구처 정희조 연구원, 031-369-0469, heejo9437@kotsa.or.kr

Guided Soft Target(GST) Test System

EuroNCAP Vehicle Target(EVT)

ADAS Vehicle Target(AVT)

평가시스템 운영차량 (K-City 통합관제차량)

평가시스템 운영차량 (K-City 통합관제차량)
LaunchPad Driving Target

Ground Traffic Control(GTC) System

Steering Robot(SR). Break&Accel Robot Test System

Soft Pedestrian Target System(SPT)

LaunchPad with bicycle dummy

Adult Dummy

Child Dummy
목적
악조건의 기상환경(강우, 안개 등)에서 자율주행차의 안전주행ㆍ성능 확보를 위한 기술개발 및 안전성 평가 환경 조성
부지위치
자동차안전연구원 주행시험장 내 도로안전시설평가장 - 광폭저마찰로
주요시설
- (시험로 구축) 연장 620m, 가변 왕복4차선 ⇒ 2차선+가변차선(3.5m)+1차선
- (재현시설동) 기상환경 재현을 위한 터널형 실험시설(연장 200m, 높이 11.2m)
- (통제실동) (1층) 전기/기계실/창고, 화장실, (2층) 통제실, 회의실, 화장실 등
- (기상재현설비) 강우(4단계 노즐 구성, 강우강도(50~60mm/h) 및 입자크기 등 조정), 안개(최소 시정거리 30m), 포그머신&포그오일 분사방식 적용
무상지원 및 시범운영
~ 2024. 12. 31.
담당자
K-City연구처 이상현 연구원, 031-369-0468


